














Projects
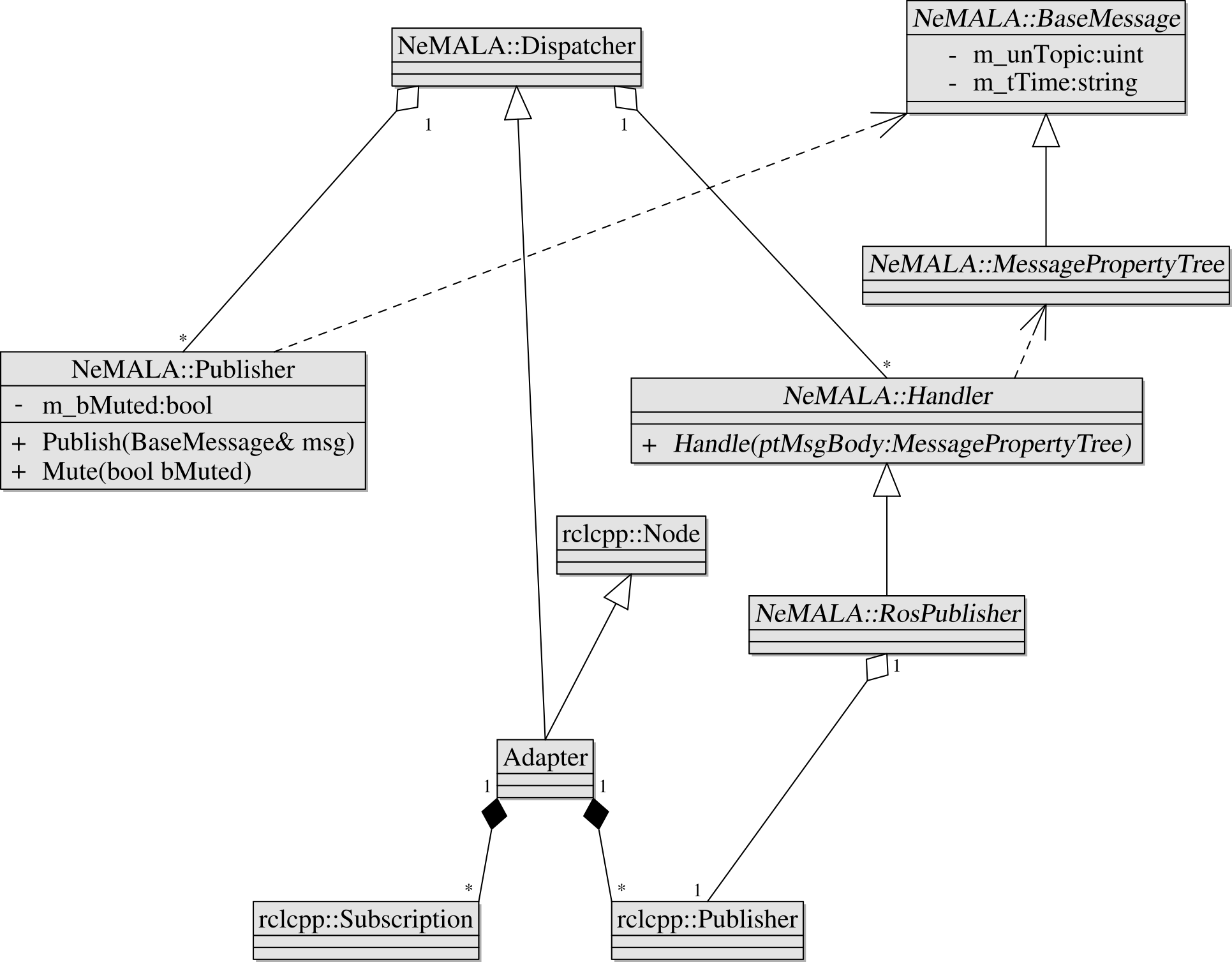
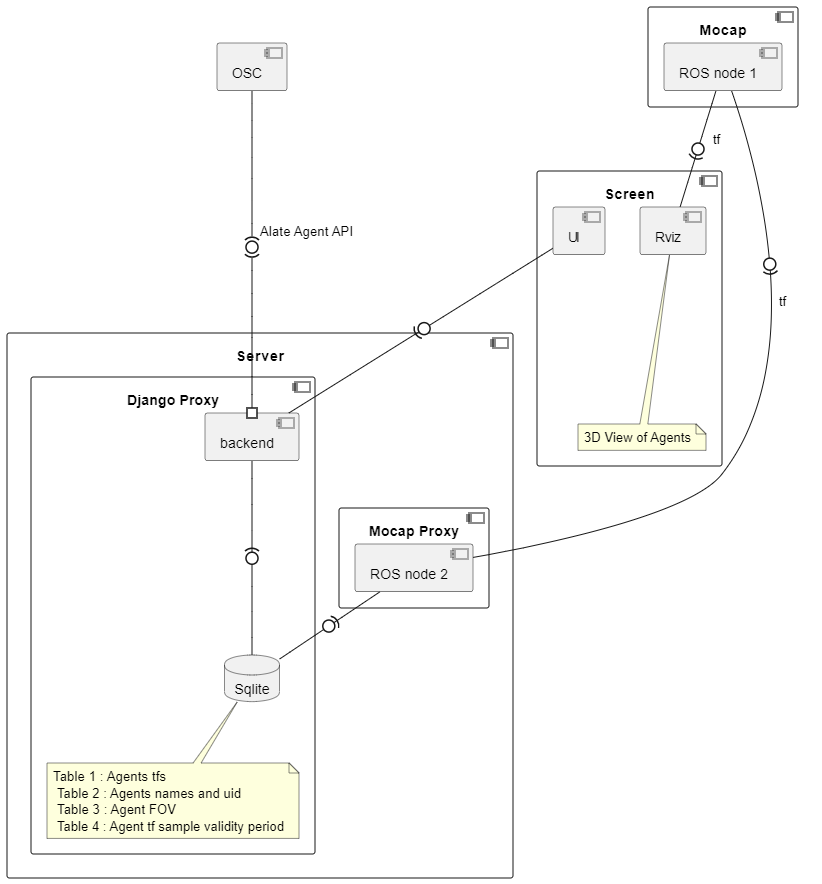
This is a NeMALA Alate companion project that implements UCSLSV beahvior indoors.
The Alate agents call the server to let the operator know what they’re up to, fetch operator commands, and answer if detected another agent in an agent’s FOV or not.
The Operator receives agents’ tfs, via a companion ROS project, Agents Monitor, and uses geometry to determine if one agent detects another.



An implementation of:
Bruckstein, Alfred & Mallows, Colin & Wagner, Israel, Probabilistic Pursuits on the Grid, The American Mathematical Monthly. 104. 10.2307/2974581 (1996).
Multi-Agent Robotic Systems Seminar final project.
An implementation of:
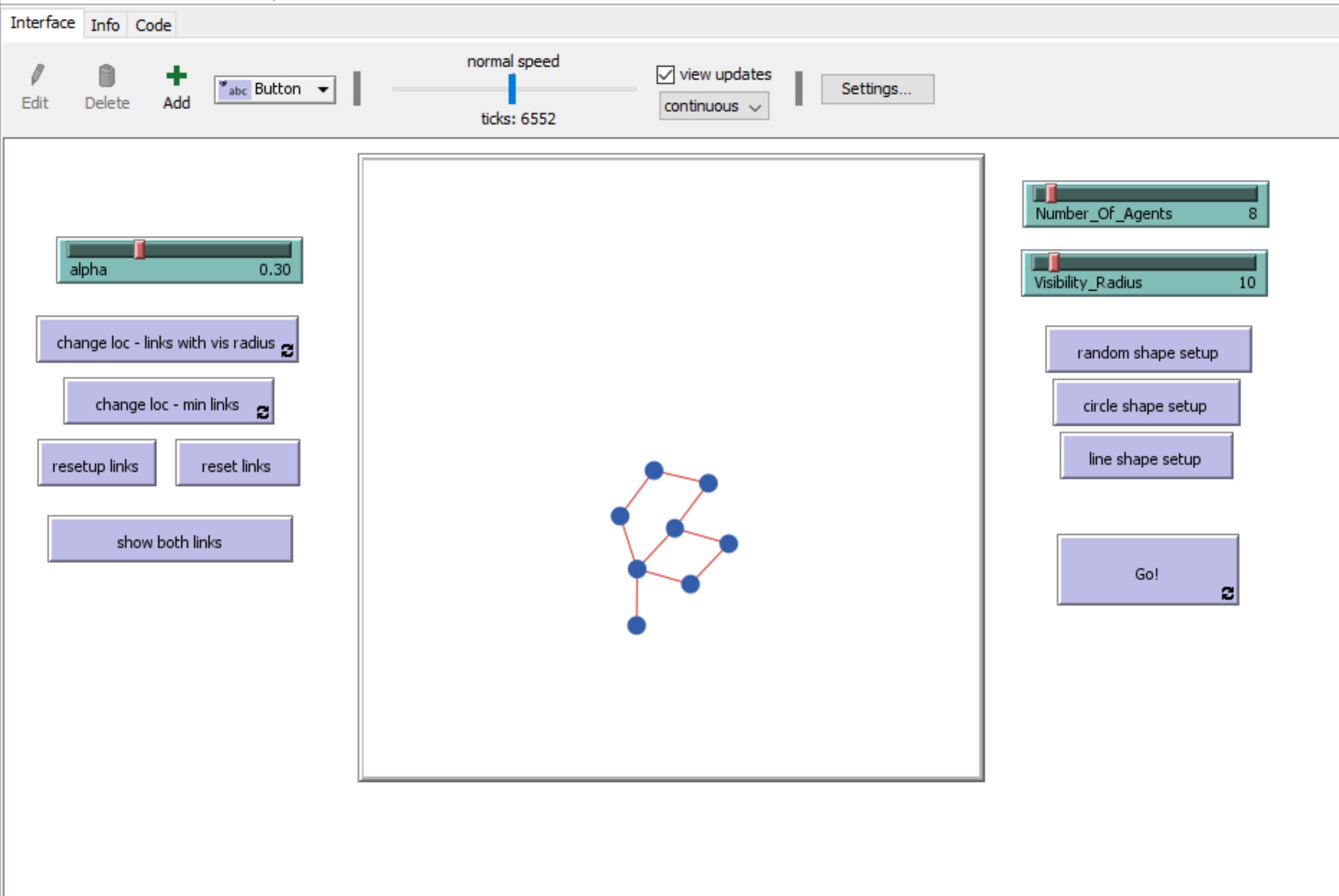
Rotem Manor, Ariel Barel & Alfred M. Bruckstein, Local Interaction for Cohesive Flexible Swarms (2019).
Multi-Agent Robotic Systems Seminar final project.
An implementation of:
Ariel Barel, Rotem Manor, and Alfred M. Bruckstein, Come together: Multi-agent geometric consensus (gathering, rendezvous, clustering, aggregation) (2019).
Multi-Agent Robotic Systems Seminar final project.
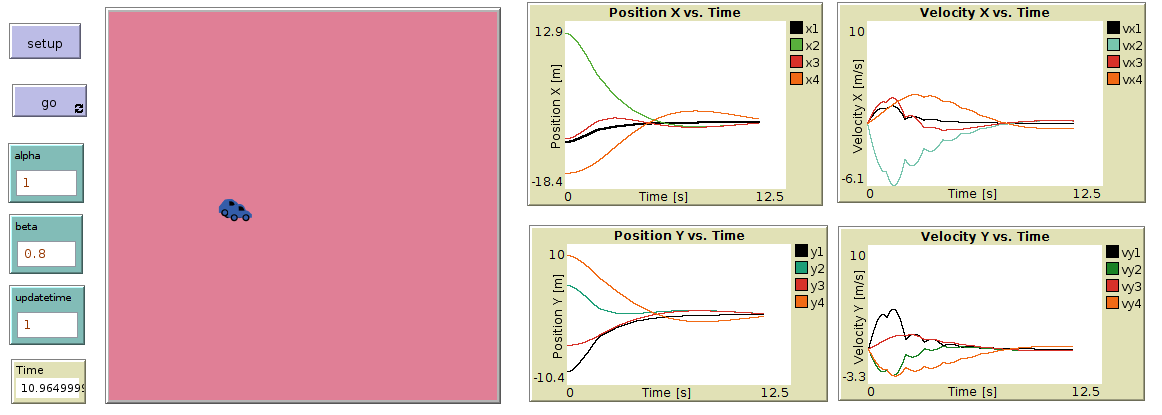
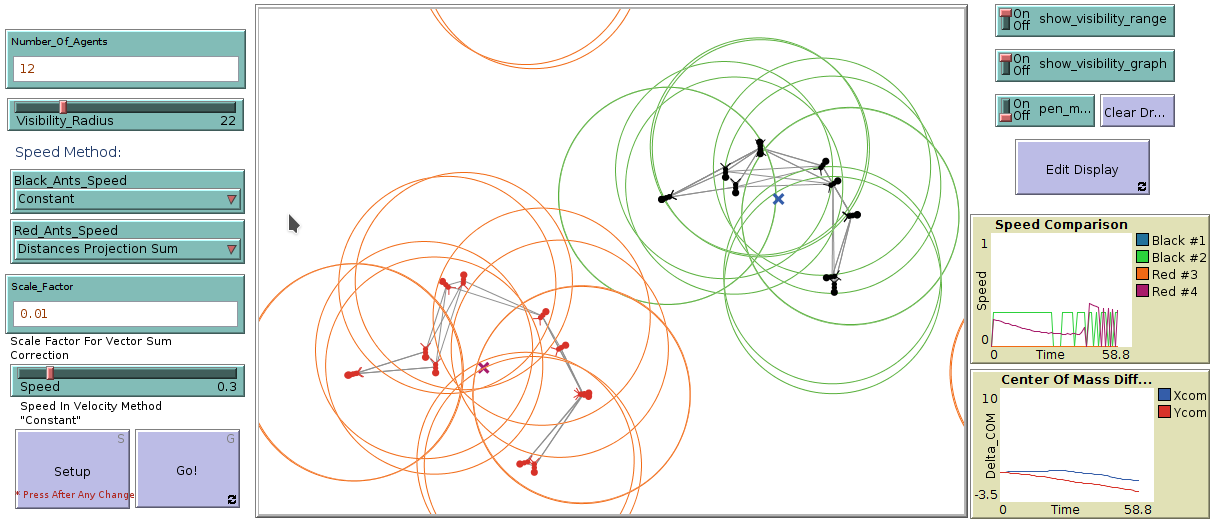
An implementation of:
Wenwu Yu, Wei Xing Zheng, Guanrong Chen, Wei Ren, Jinde Cao, Second-order
consensus in multi-agent dynamical systems with sampled position data,
Automatica 47 (2011), pp. 1496–1503.
Multi-Agent Robotic Systems Seminar final project.
An implementation of:
Bellaiche, Levi Itzhak, and Alfred Bruckstein, Continuous time gathering of agents with limited visibility and bearing-only sensing, Swarm Intelligence 11.3-4 (2017): 271-293].
Multi-Agent Robotic Systems Seminar final project.
A ROS-turtlebot2 implementation of a simple swarming protocol using onboard sensors only.
Using the RGB camera, turtles that detect other agents turn in a larger turning radius than those that do not.
Using the ladar, turtles that detect obstacles in front of them switch to forward velocity zero and rotate until the obstacle leaves their field of view.
Using the bumpers, turtles that bump into obstacles not detected by the ladar perform a little maneuver to free themselves form the obstacle.
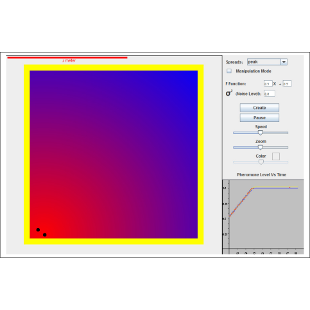
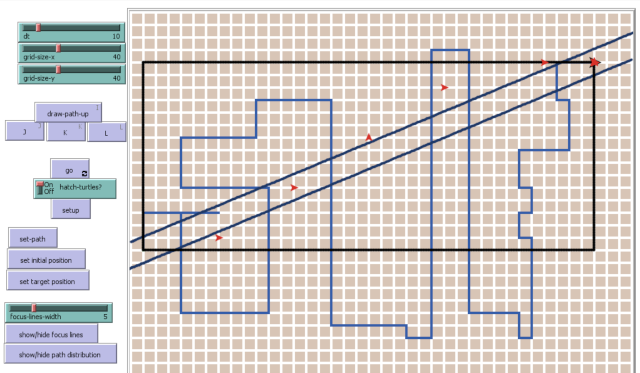
In this project we create a simulator of two robots reactive gradient following algorithm using point measurements was presented.
Using indirect motion based communication. The robots compare point measurements and drift with the gradient. The simulator have two modes of spreads: a peak mode and a gradient follow by the x axis. In addition the user can define some manipulations in the robot’s world. He can define the parameters of a linear function and a level of noise that define the distance between the robots. The User can control on the speed and the zoom of the robots and see their locations in a graph.
The simulator provides a Solution based on the paper “Two-Robot Source Seeking with Point Measurements” by Yotam Elor and Alfred M. Bruckstein.
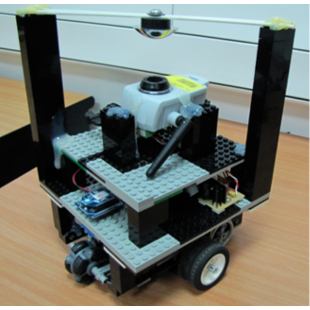
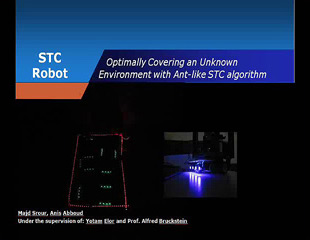
In this project the robot is optimally covering an unknown domain using a camera and a fish-eye lens. The robot follows the STC algorithm proposed by Gabrieli & Rimon. See the project book.
An implementation of:
A Thermodynamic Approach to the Analysis of Multi-Robot Cooperative Localization Under Independent Errors, Yotam Elor and Alfred M. Bruckstein, Faculty of Computer Science and the Goldstein UAV and Satellite Center.
Winner of the Amdocs Project Competition of 2010!
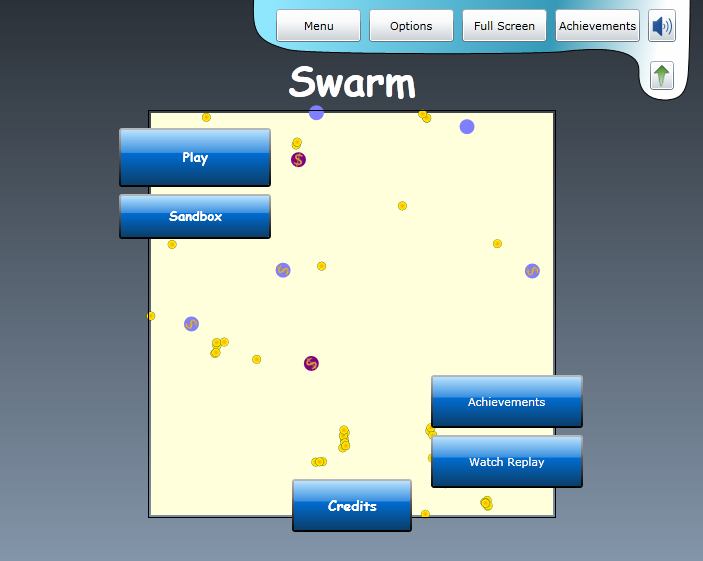
Swarm is an educational game presenting the power and beauty of muti-robot systems. A series of multi-robot tasks is presented to the player. The player is required to design and program robots that perform the tasks. A simple graphic interface is used to build and program(!) the robots.
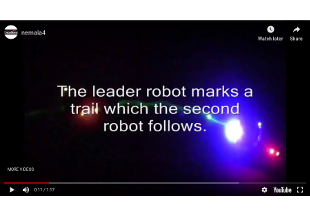
In this project the robots have mimicked a simple line following behavior of ants. One robot (the leader) had marked a line by charging the Phosphorescent color on the floor. The second robot had followed the line using two light sensors.
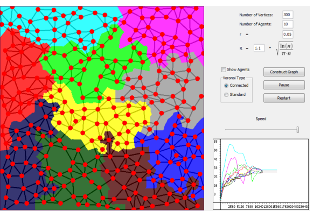
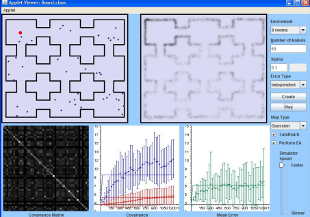
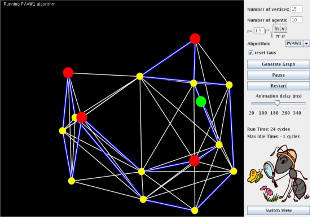
The goal of patrolling ion this context is to visit each point (vertex) as often as possible given an area (modeled as undirected graph) to patrol, and a number of low capability agents that have limited memory and are able to perform local interactions between them.
We analyze several runs on various domains using Mark-Ant-Walk algorithm for robust and efficient covering of continuous domains by ant-like robots.
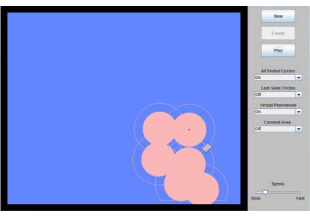
In our project we present a Simulator for a new pheromone based domain covering algorithm. Our goal is to perform a continuous area patrolling using a robot. The said robot is capable of marking pheromone trails of varying intensity and is equipped with sensors, allowing him to identify previously marked pheromone circles upon crossing them. Also, the robot’s memory size is independent of the domain size, meaning it has no capability of learning the said domain.
The simulator provides a Solution based on the paper “Robot Cover” by Yotam Elor and Alfred M. Bruckstein.
Our goal is to perform an area patrolling using ant-like agents. The area we deal with is a group of stations with paths between them. The stations have to be visited as frequent as possible. The time intervals between two subsequent visits to the same station are called idleness. In other words, our goal is to achieve the minimal idleness possible.
Many insects interact by leaving pheromone traces in the environment. In this project the robot mimics that behavior by working on a floor covered with Phosphorescent color.
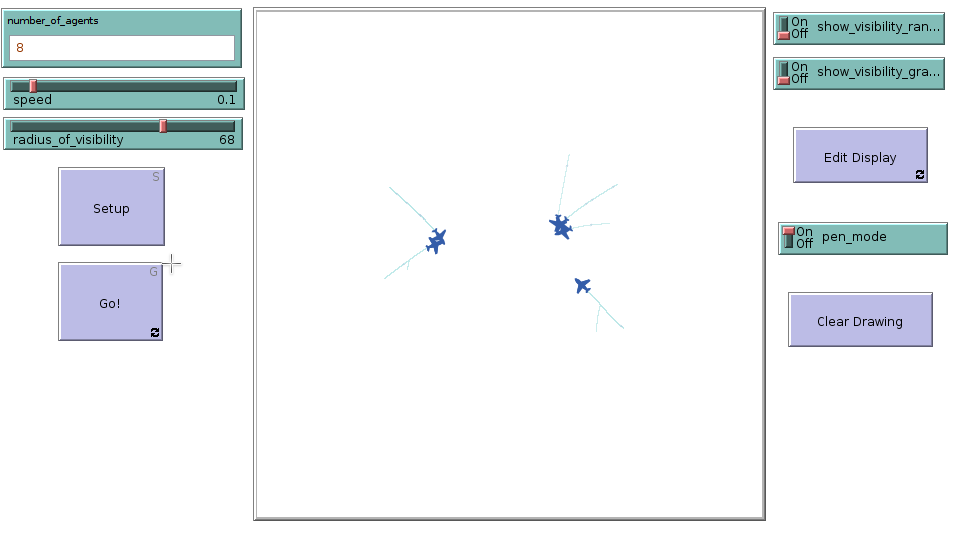
In this project, we investigate the properties of a flock of birds in the fimiliar V formation. We study the considerations a single bird applies while finding its place in the formation. We use these presumable considerations to implement an algorithm for a single bird in the flock, and examine the outcome under various assumptions when putting several birds together. In order to imitate reality as much as possible, each bird is unaware of its friends’ decisions, and is unable to communicate with them. There is no “centeral brain” controlling all birds, and each has to make a decision using very limited and noisy sensors.

The main objective of this project is to improve the accuracy of the odometry by averaging the estimated locations available from two robots when these two are close to each other.
A simulation system was built in order to test and estimate the performances of different suggested algorithms and a Lego based robotic system was built in order to execute and prove the practicality of the MARS solution.